学科概要
機械工学×情報工学を学ぶ
■ものづくりのベースとなる「メカトロニクス」、機械工学とI Tが結びついた「ロボティクス」、人間情報や人工知能、制御理論を学ぶ「知能システム」の3つの履修モデルを設定。
■機械工学や情報工学の基礎となる科目のほか、実学系科目も充実。また、実際の設計・加工・組立作業を伴う体験型授業やプロジェクト研究を通じて、「ものづくり」の現場で即戦力として活躍できる、高度な基礎能力を持ったエンジニアを養成します。
Pickup 研究
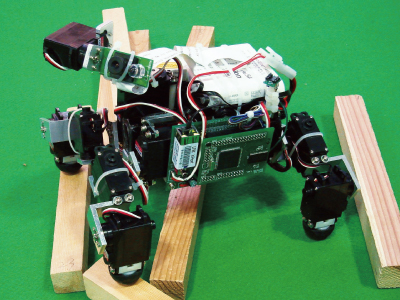
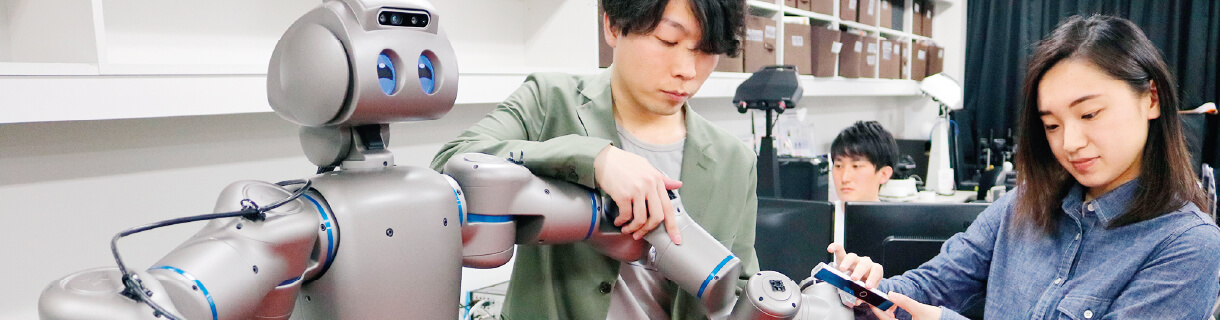
危険をともなう環境のなかで人の代わりに働くロボットを開発。
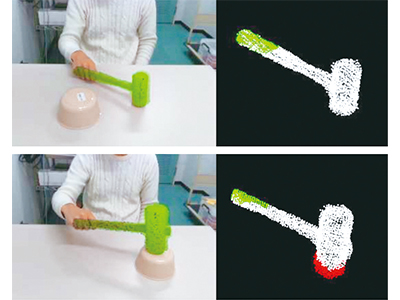
「ロボットは人を助ける存在であるべき」という信念を持ち、人が移動できない極限の環境下を踏破できるロボットの研究・開発に取り組んでいるのが森島教授だ。1990年代初頭に教授が初めて論文発表したのは、狭小空間での移動を可能としたヘビ型ロボットの開発。近年では人のように自ら考えて動く「自律型ロボット」が開発のキーワードになっており、教授も人の行動が制限される環境内での自律型ロボットの研究を継続中だ。情報工学の発達に加え、ロボットは使用する環境や目的によってさまざまな形状が考えられる。同じコンセプトを持つロボットでも研究者によって形や動き、内部の仕組みなどが全く異なるのが開発の面白さだ。
未来の研究者たちへ
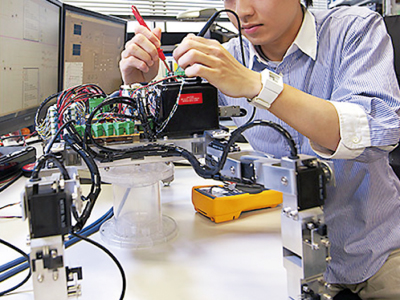
ロボット開発にはプログラミングや電気・電子回路設計といったコンピュータの知識に加え、機械設計や材料工学、情報工学などの知識も必要。ロボットをゼロから製作する体験を通じ、システム全体を見渡せるジェネラリストとしての能力と、それぞれの専門分野のスペシャリストとしての能力の両方を身につけましょう。

工学部 機械システム工学科 ロボット&マンマシン・インターフェース研究室 森島 昭男教授
【所属学生研究テーマ】
- ・二足歩行ロボットの動的に自然な歩行制御
- ・機械学習による自動運転
- ・LiDARを用いた衝突防止のための車体制御